Smartphone navigation positionning, fusion GPS and IMU sensors.

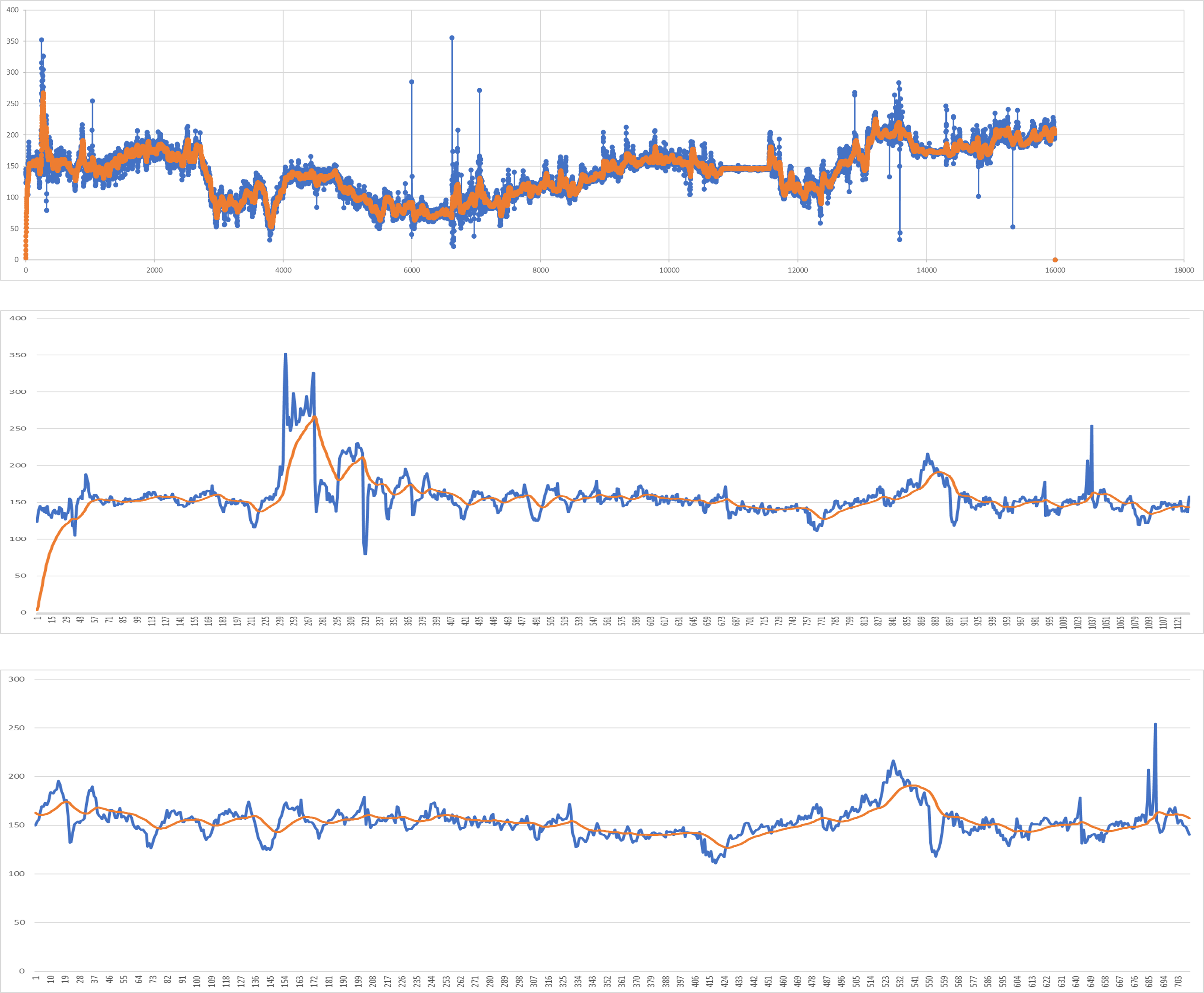
Positioning is the most basic and crucial step in the driving navigation. An accurate positioning can effectively improve the accuracy of the road-binding, and can also sense the change of the driving pattern more accurately. Since the project is mainly based on mobile phones for navigation and positioning, Currently used is the built-in sensor data (gyroscope, accelerometer, geomagnetic meter, direction sensor, gravity sensor) and GPS data fusion positioning.
First make sure gcc and cmake was installed, and include this library into your project.
git clone https://github.com/yyccR/Location.git
Second open your CMakeLists.txt and add these:
include_directories(${PROJECT_SOURCE_DIR}/Location/include/eigen3)include_directories(${PROJECT_SOURCE_DIR}/Location/math)add_subdirectory(Location/math)include_directories(${PROJECT_SOURCE_DIR}/Location/models)add_subdirectory(Location/models)include_directories(${PROJECT_SOURCE_DIR}/Location/location)add_subdirectory(Location/location)include_directories(${PROJECT_SOURCE_DIR}/Location/sensor)add_subdirectory(Location/sensor)include_directories(${PROJECT_SOURCE_DIR}/Location/system)add_subdirectory(Location/system)target_link_libraries(${PROJECT_NAME} Location_math)target_link_libraries(${PROJECT_NAME} Location_models)target_link_libraries(${PROJECT_NAME} Location_location)target_link_libraries(${PROJECT_NAME} Location_sensor)target_link_libraries(${PROJECT_NAME} Location_system)target_link_libraries(${PROJECT_NAME} Location_test)
final open your main file, and add the test code.
#include <iomanip>#include <Eigen/Dense>#include "sensor/GPS.h"#include "location/Location.h"using namespace Eigen;using namespace std;int main() {Location location;Vector3d gyro_data_v(0.004263,0.019169,-0.001014);Vector3d mag_data_v(-2.313675,-82.446960,-366.183838);Vector3d acc_data_v(0.105081,0.108075,9.774973);VectorXd gps_data_v(7);gps_data_v << 114.174118,22.283789,0.0,0.0,24.0,0.0,1554348968704.665039;Vector3d g_data_v(0.094139, 0.107857,9.808955);Vector3d ornt_data_v(-0.549866,0.629957,-0.069398);Vector3d road_data(1000.0, 0.0, 0);location.PredictCurrentPosition(gyro_data_v,acc_data_v,mag_data_v,gps_data_v,g_data_v,ornt_data_v, road_data);cout << location.GetGNSSINS().lng << " " << location.GetGNSSINS().lat << endl;return 0;}
if you see the output 114.174 22.2838 that means this library was embedded to your project successfully.
gyroscope(x, y, z), origin gyroscope data, unit rad/s
accelerometer(x, y, z), origin accelerometer data, unit m/s²
geomagnetic meter(x, y, z), origin geomagnetic data, unit μt
gravity sensor(x, y, z), origin gravity data, unit m/s²
direction sensor(roll, pitch, yaw), origin sensor data, unit degree
Note that direction sensor doesn’t exit actually , the ‘sensor data’ is computation result from system underlying algorithm.
compass(degree), origin sensor data, unit degree
road info(distance to next cross, bearing, road type)
This data is from map data, and if you couldn’t search map server data, just fill in all zero (0.0, 0.0, 0.0)