r:trån is a road space model transformer library for OpenDRIVE, CityGML and beyond
![]()
a road space model transformer library for OpenDRIVE, CityGML and beyond
View Demos
·
Report Bug
·
Request Feature


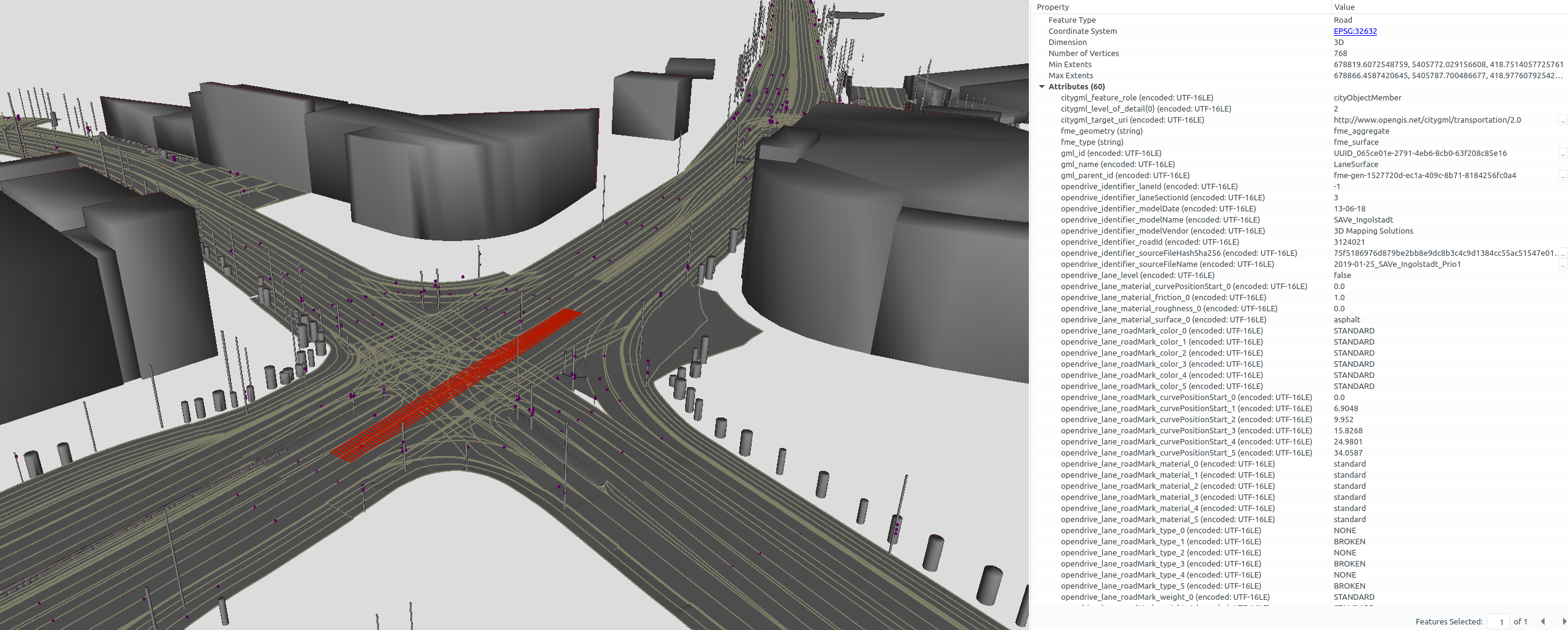
r:trån reads road network models in OpenDRIVE and transforms them to the virtual 3D city model standard CityGML.
This enables you to
 Datasets
DatasetsDownload some sample OpenDRIVE datasets of the city of Ingolstadt from the company 3D Mapping Solutions (initial registration required).
Additionally, awesome-openx provides a list of further OpenDRIVE datasets.
 Usage
UsageIn order to use r:trån you need JDK 11 or later.
Download the prebuilt JAR executable from the releases section and make sure that you have at least a JVM 11.
Run r:trån to …
# … validate OpenDRIVE datasetsjava -jar rtron.jar validate-opendrive ./input-opendrive ./output-reports# … transform OpenDRIVE datasets to CityGMLjava -jar rtron.jar opendrive-to-citygml ./input-opendrive ./output-citygml
R:trån recursively iterates over your OpenDRIVE input datasets and creates the same directory structure for the output folder.
 Building
BuildingClone the repo and let gradle build it:
./gradlew shadowJar # build the uber-jarcd rtron-cli/build/libsjava -jar rtron-*.jar
You’re good to go 
 Contributing
Contributingr:trån was developed so that everyone can benefit from spatio-semantic road space models.
Therefore, bug fixes, issue reports and contributions are greatly appreciated.
 Research
ResearchThe software r:trån can be cited using the ![]() .
.
If you use this software, please cite one of the supplemental research articles:
These papers may also be of interest:
 License
Licenser:trån is distributed under the Apache License 2.0. See LICENSE for more information.
 Thanks
Thanks